



作品名称基于YOLO-UNET的视觉道路智导系统
参赛院校大连海事大学/上海交通大学
指导老师郭世凯
团队成员薛然文、勇思羽、刘泽斌、柴昱、罗盟之
奖项等级国赛二等奖
竞赛年份2023
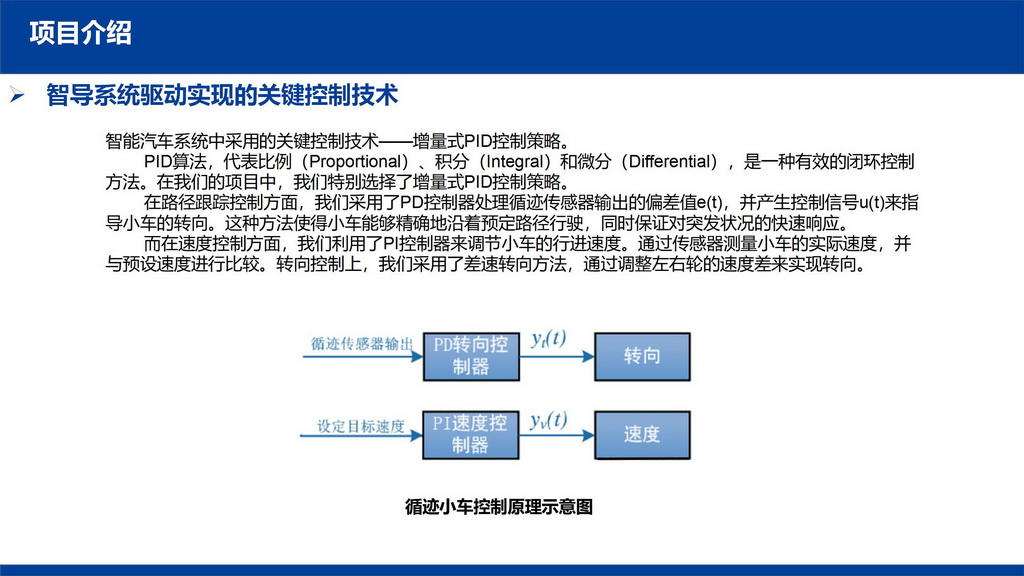
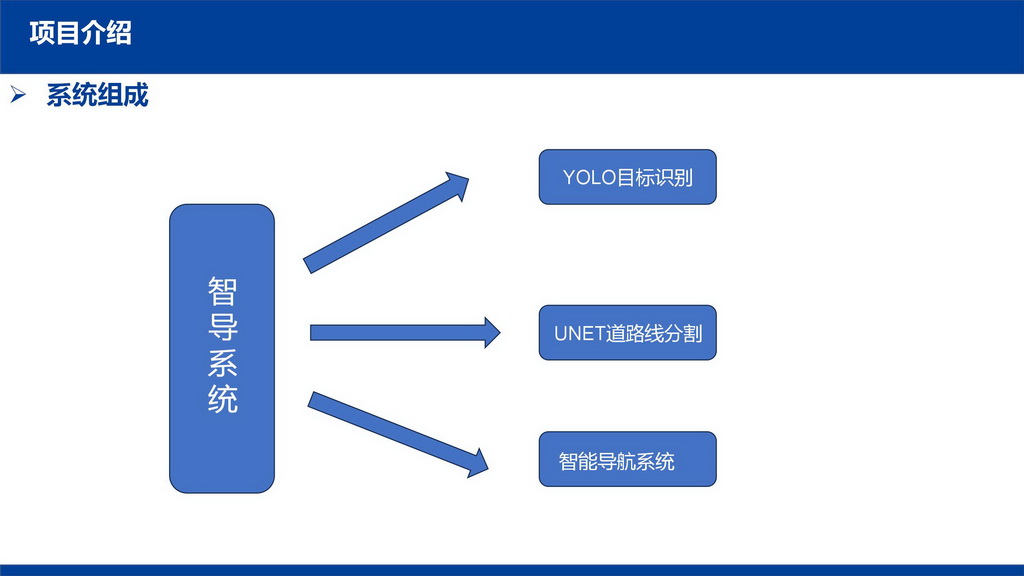
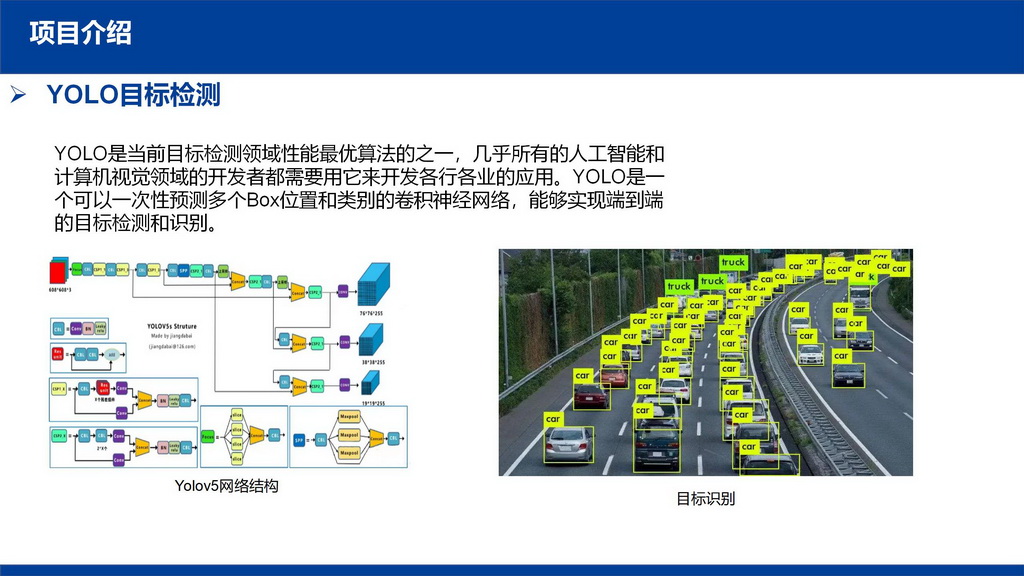
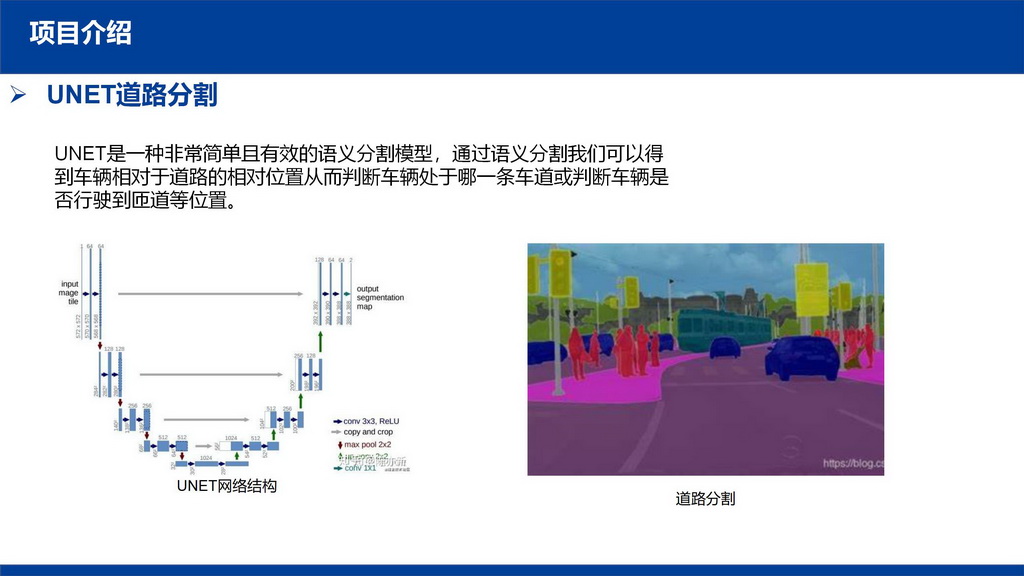
项目“基于YOLO-UNET的视觉道路智导系统”旨在为无人驾驶和智能交通系统提供准确、高效的道路与交通标志识别。该项目整合了YOLOv5-7.0模型与UNET技术,并用Pytorch和TensorRT进行训练和部署。CUDA技术确保了计算的高速加速。利用UNET和OpenCV处理,我们得到高对比度的二值化图像,优化了巡线功能,并通过曲线拟合实现了精准的单边巡线功能。本系统展现了创新和技术卓越性,符合“智能改变生活,创意提升品质”的理念,期望推动智能交通的发展,为未来的交通系统提供安全和效率的保障。



