
作品名称面向智能制造应用的移动操作机器人
参赛院校辽宁工程技术大学
指导老师李逃昌
团队成员史麦瑞、唐金宇、王越、韩宇
奖项等级三等奖
竞赛年份2022
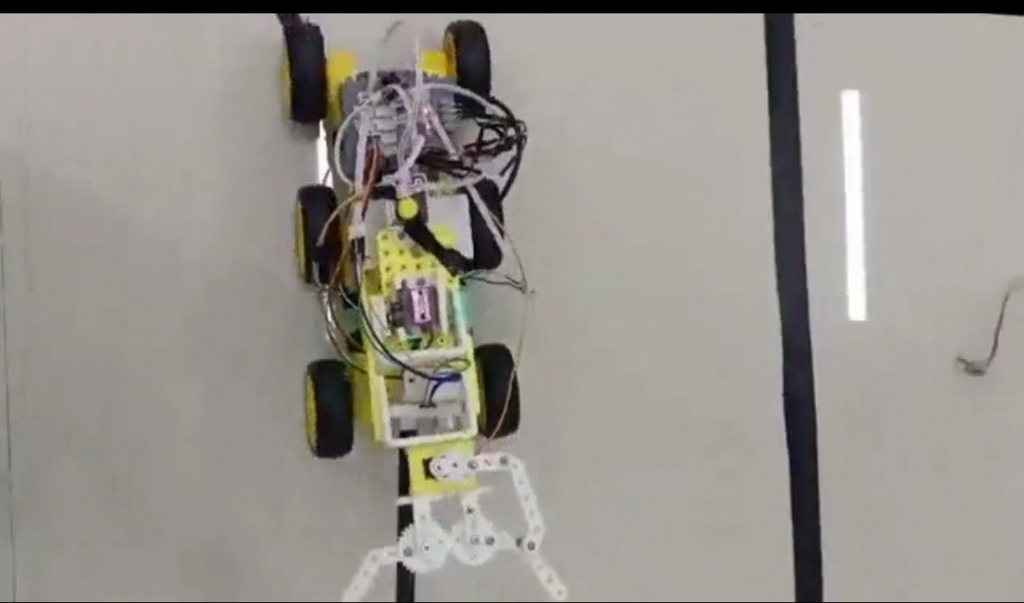
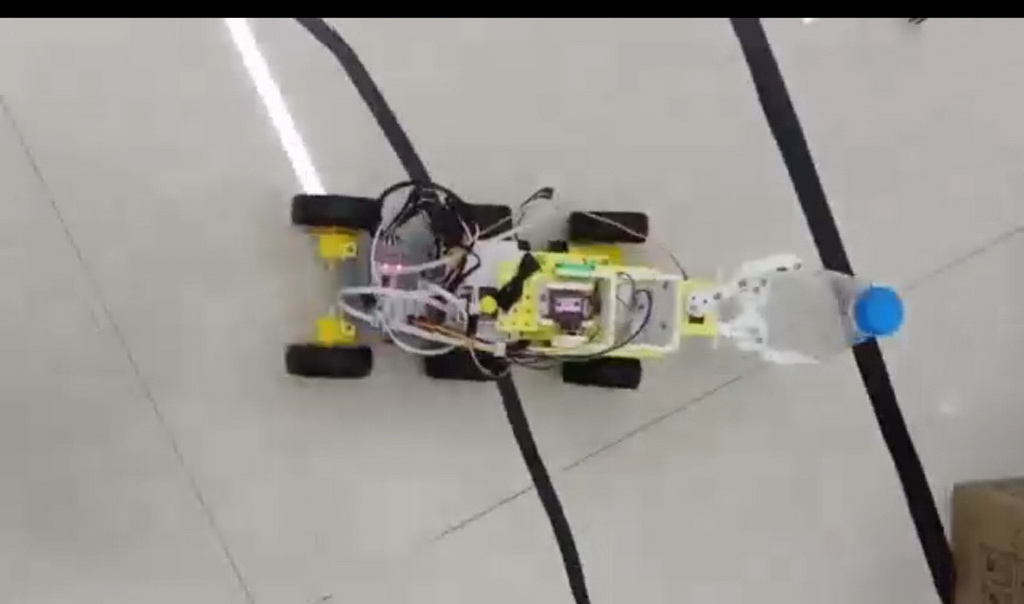
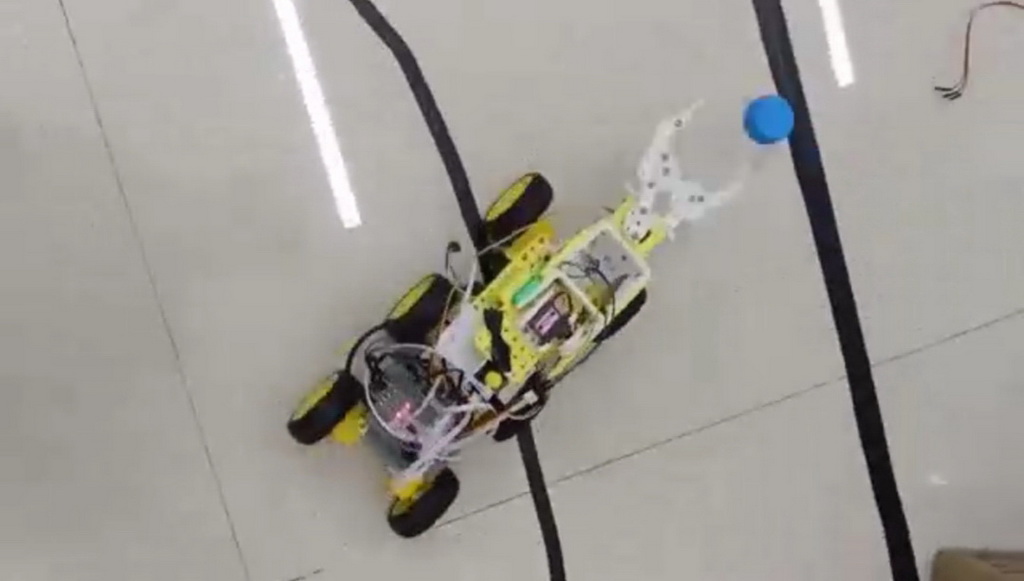
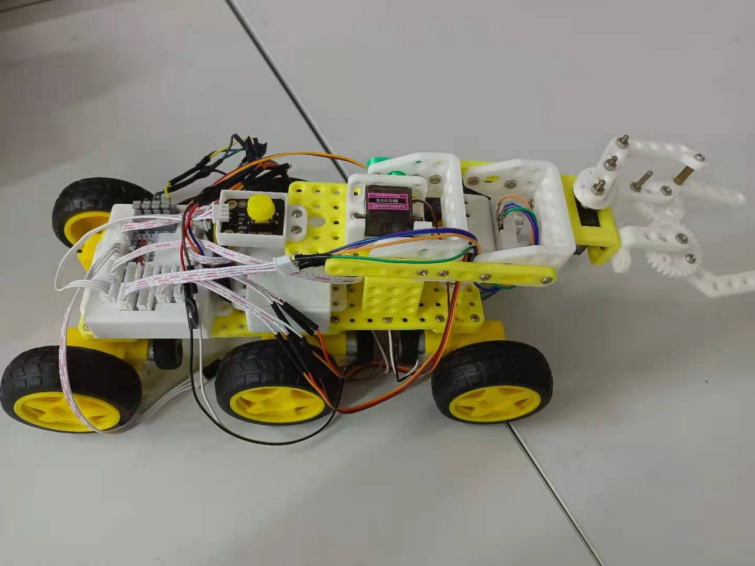
面向智能制造应用的移动操作机器人需要能实现自主移动和智能抓取两大功能。本设计将采用了这两大功能分别设计,最后再将自主移动与智能抓取两大功能组合使用的方案。由智能小车来实现智能搬运机器人的自主移动环节,由机械臂来完成智能搬运机器人的智能抓取功能,以搭载着机械臂的移动机器人为中心,使用各种传感器作为机器人的感官,实现环境感知的能力。本设计将模块化思想引入了面向智能制造应用的移动操作机器人的软件编程中,可重构智能化交通运输功能机器人主要由三大功能模块组成,包括机器人自主移动、避障定位和智能抓取三部分,本设计会先完成各个单独的功能模块,最后将三部分功能进行整合,完成面向智能制造应用的移动操作机器人的软件部分设计。 面向智能制造应用的移动操作机器人的自主移动将吸收模块化的思想,各个部分模块化设计,集成化应用,自主移动包括包括基于超声波传感器的自主避障模块、基于红外循迹传感器的黑线循迹模块,两部分集合而成。智能搬运环节则是基于机器人运动学解算算法,通过舵机角度和超声波距离确定货物位置,最终实现智能抓取。将可重构智能化交通运输功能机器人的自主移动及智能抓取两部分进行模块化划分,使可重构智能化交通运输功能机器人的实现难度大为降低。



