

作品名称家居智能搬运机器人 神龙摆
参赛院校南京工程学院
指导老师耿冉冉、包雪峰
团队成员卢旭鸿、周杰、李胜、王琪儿、柴博严
奖项等级国赛二等奖
竞赛年份2023
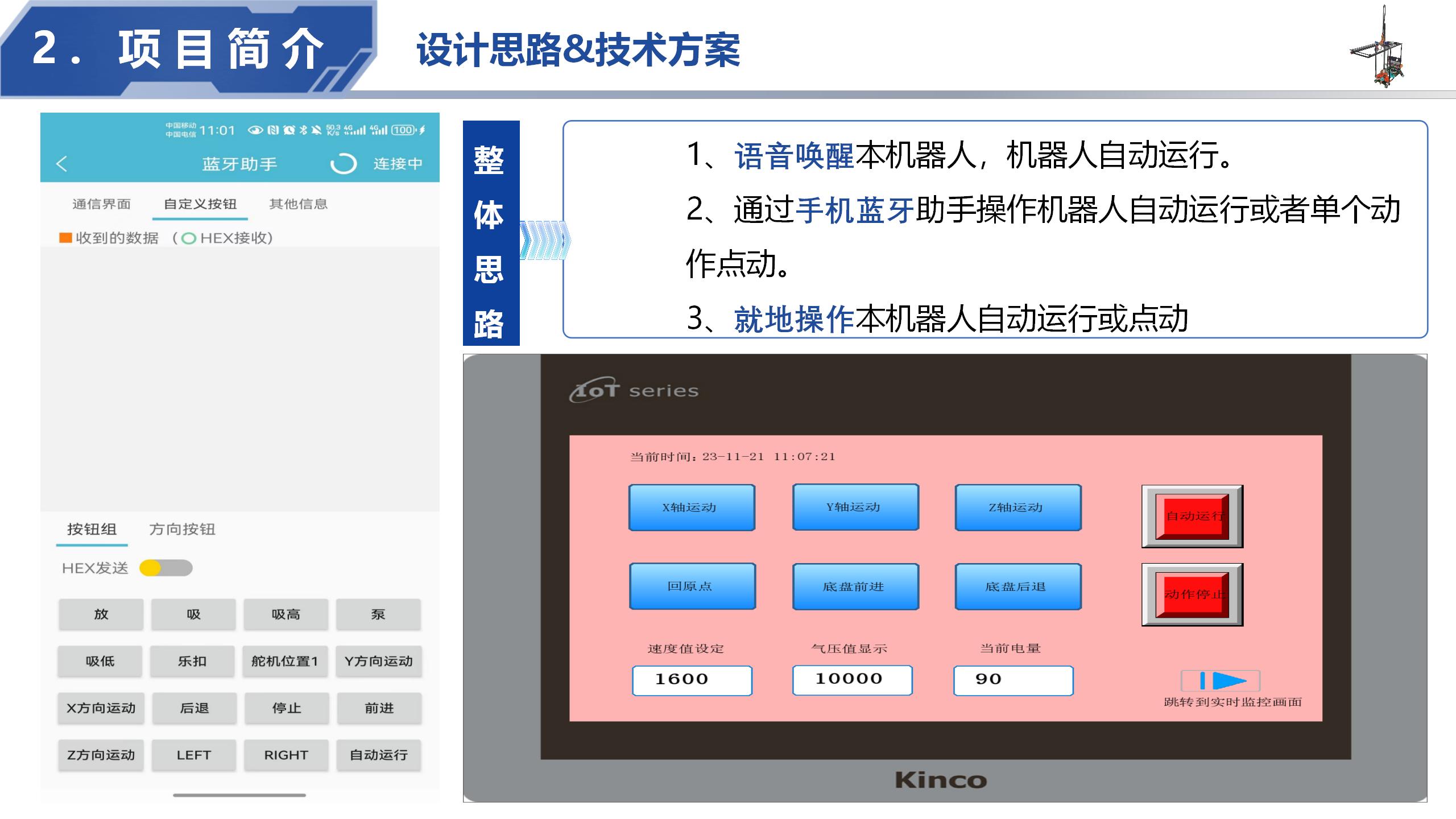
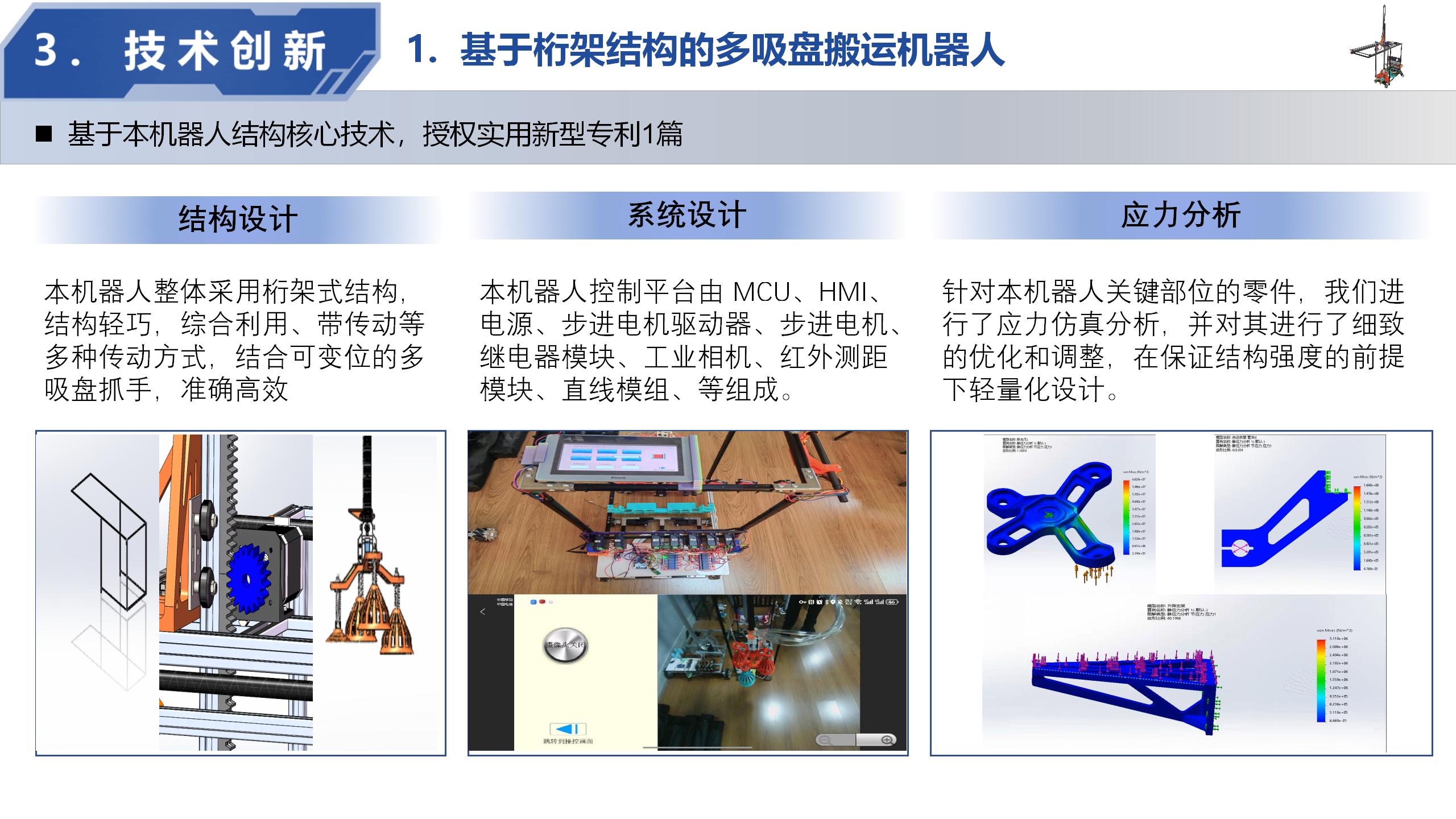
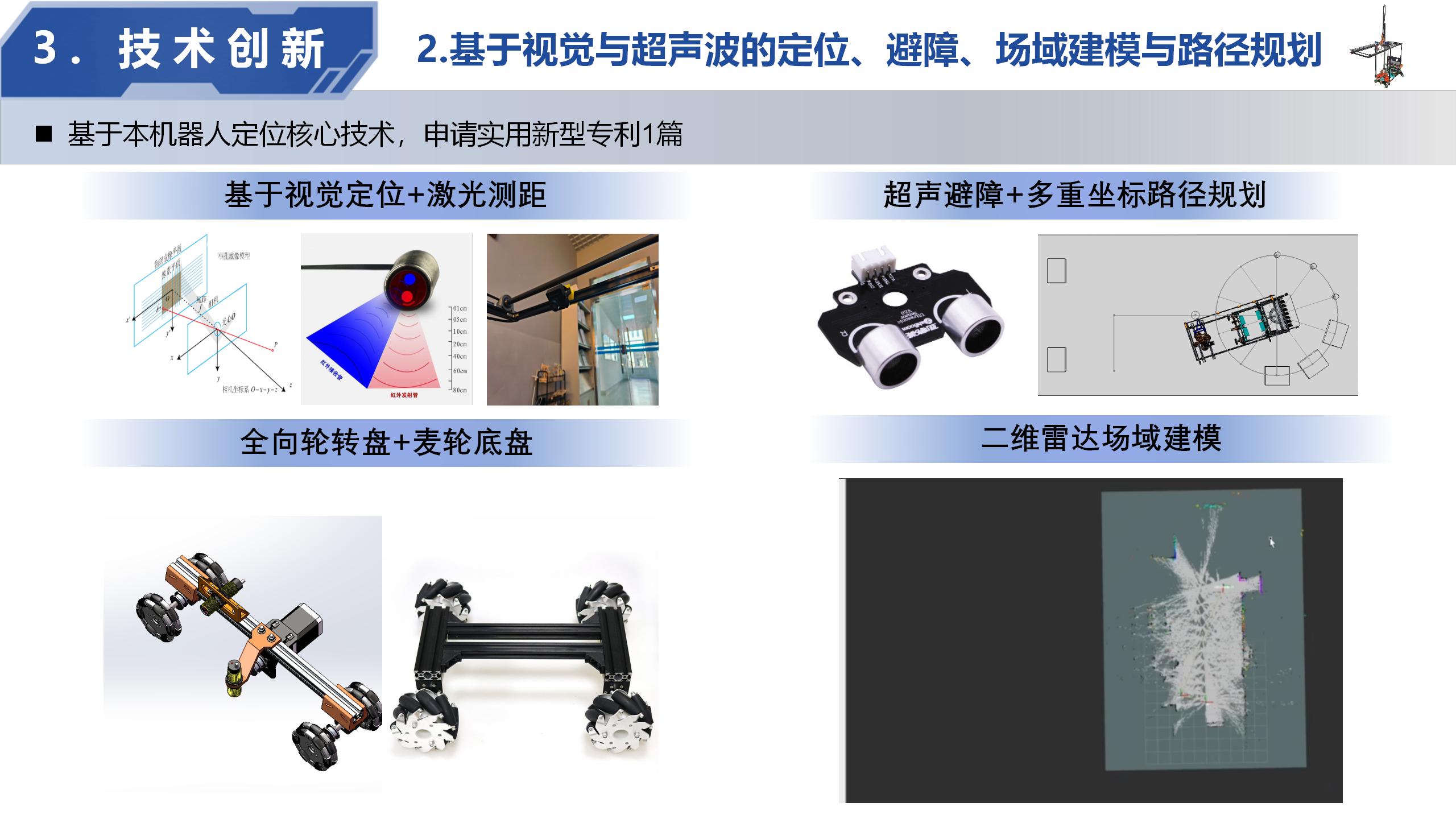
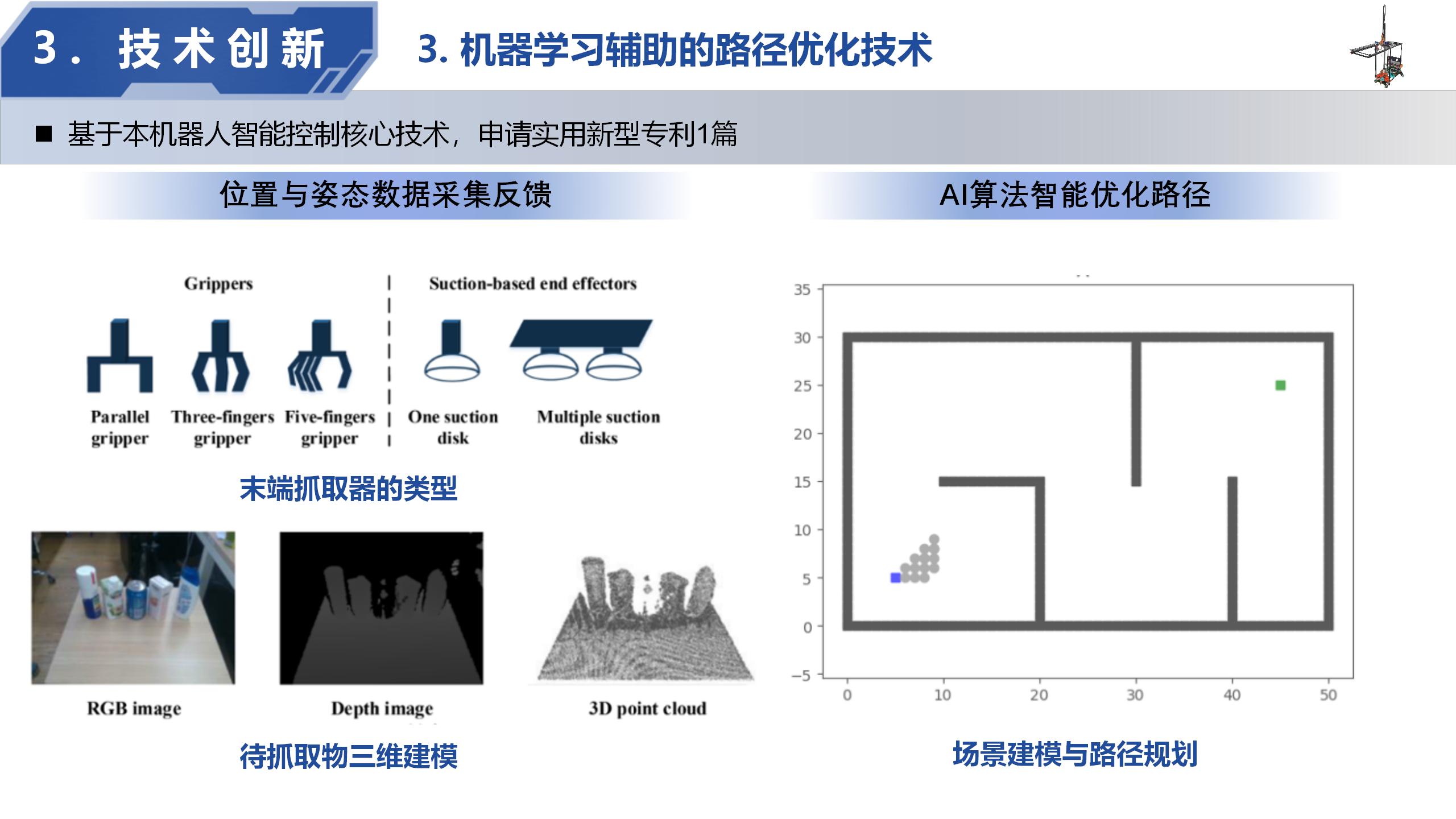
神龙摆采用了桁架结构和自走设计,能根据主人的指令主动感知环境,智能规划路线,快速准确的完成任务,同时具有出色的起重和搬运能力。使用真空吸盘,集成在机器人的臂架上,能可靠的柔性吸附物品,并精准搬运,机械臂的自转采用全向轮以底盘为中心旋转,整机在稳定性,路径规划,搬运效率,抓取精度等方面都有优秀的表现。



