
作品名称基于OPS平面定位系统的无人机毫米级换电起降平台
参赛院校山东理工大学
指导老师高跃武、王洪博
团队成员郭傲然、赵兵、王辉岩
奖项等级国赛二等奖
竞赛年份2023
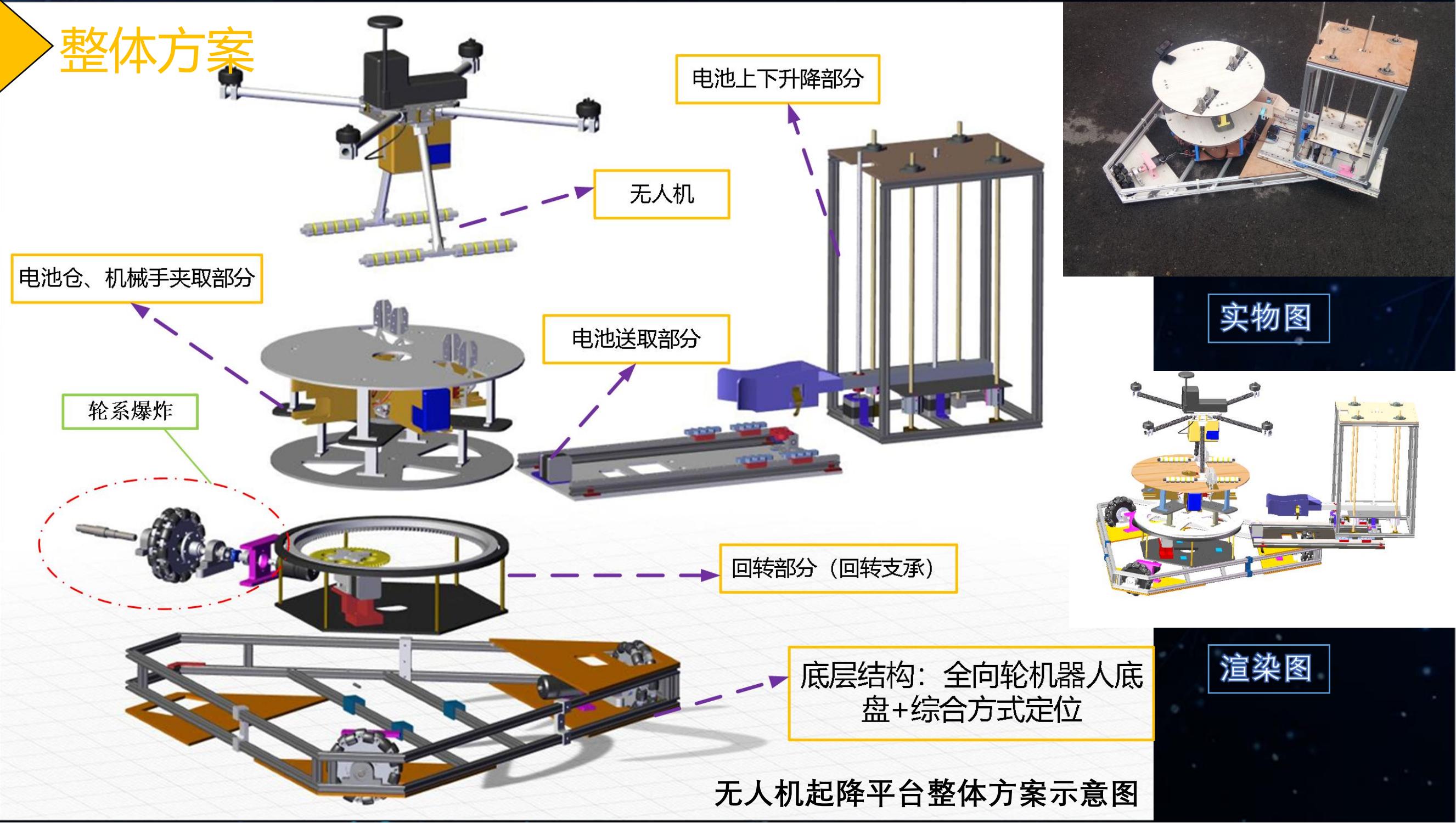
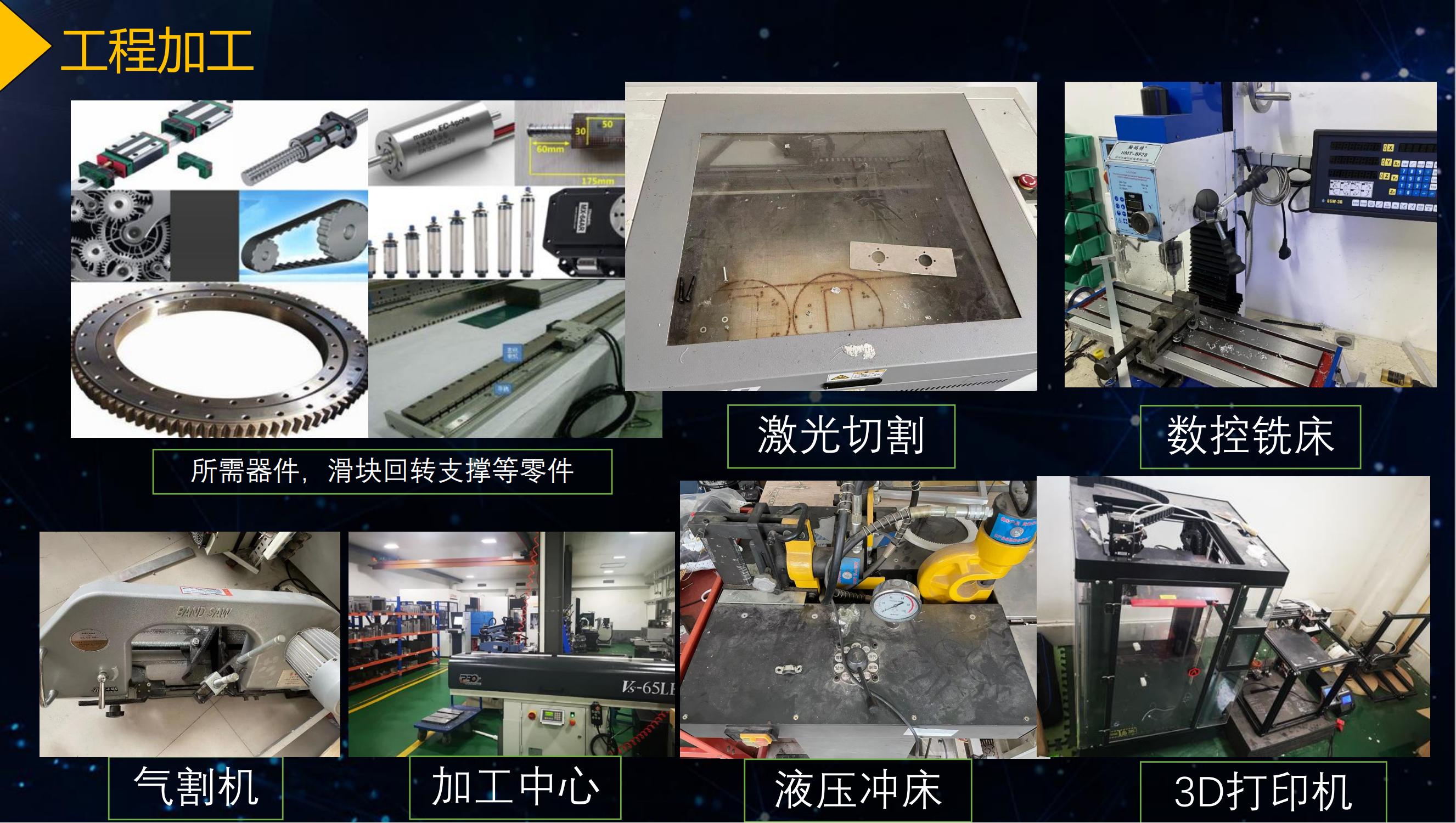
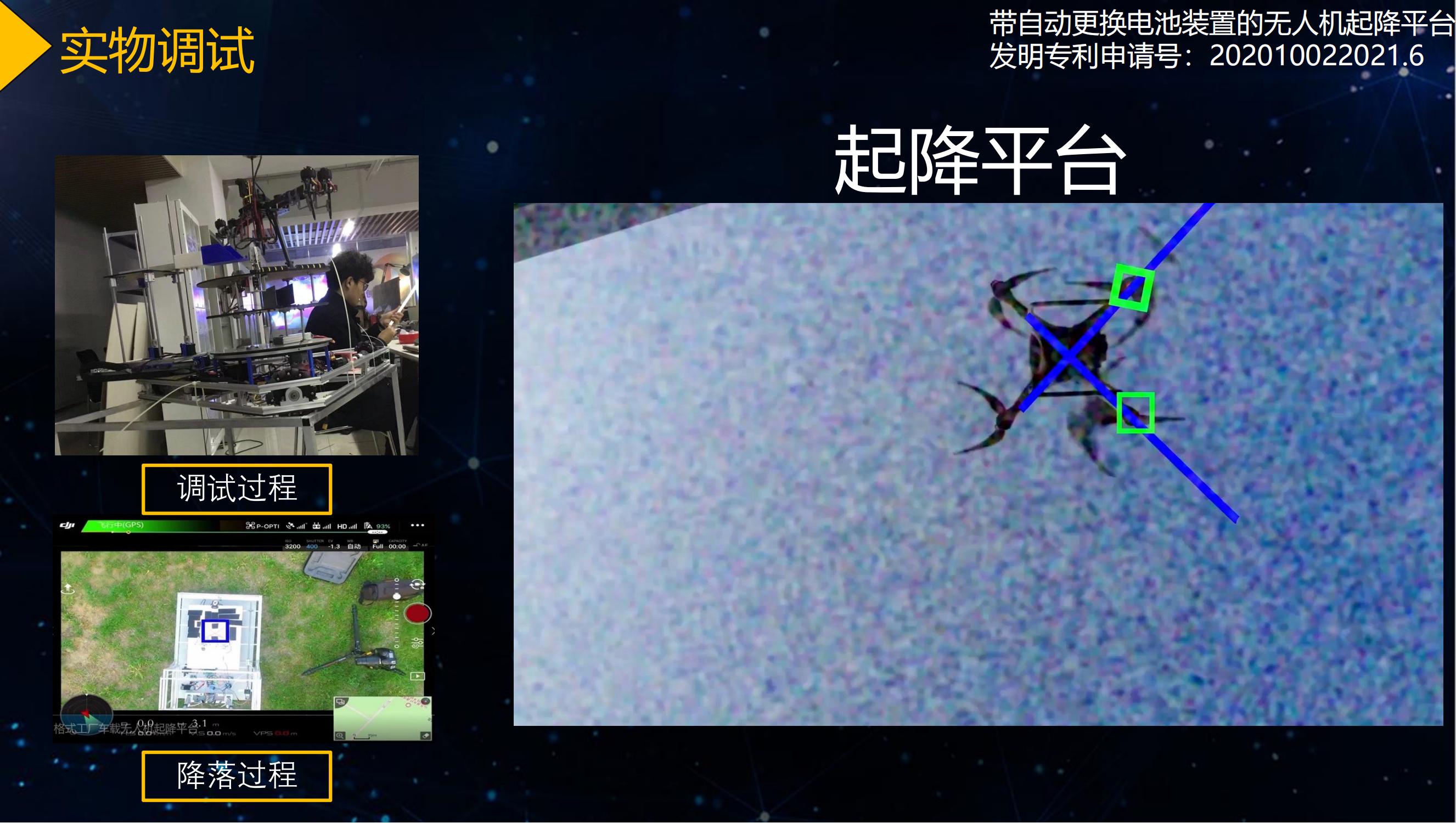
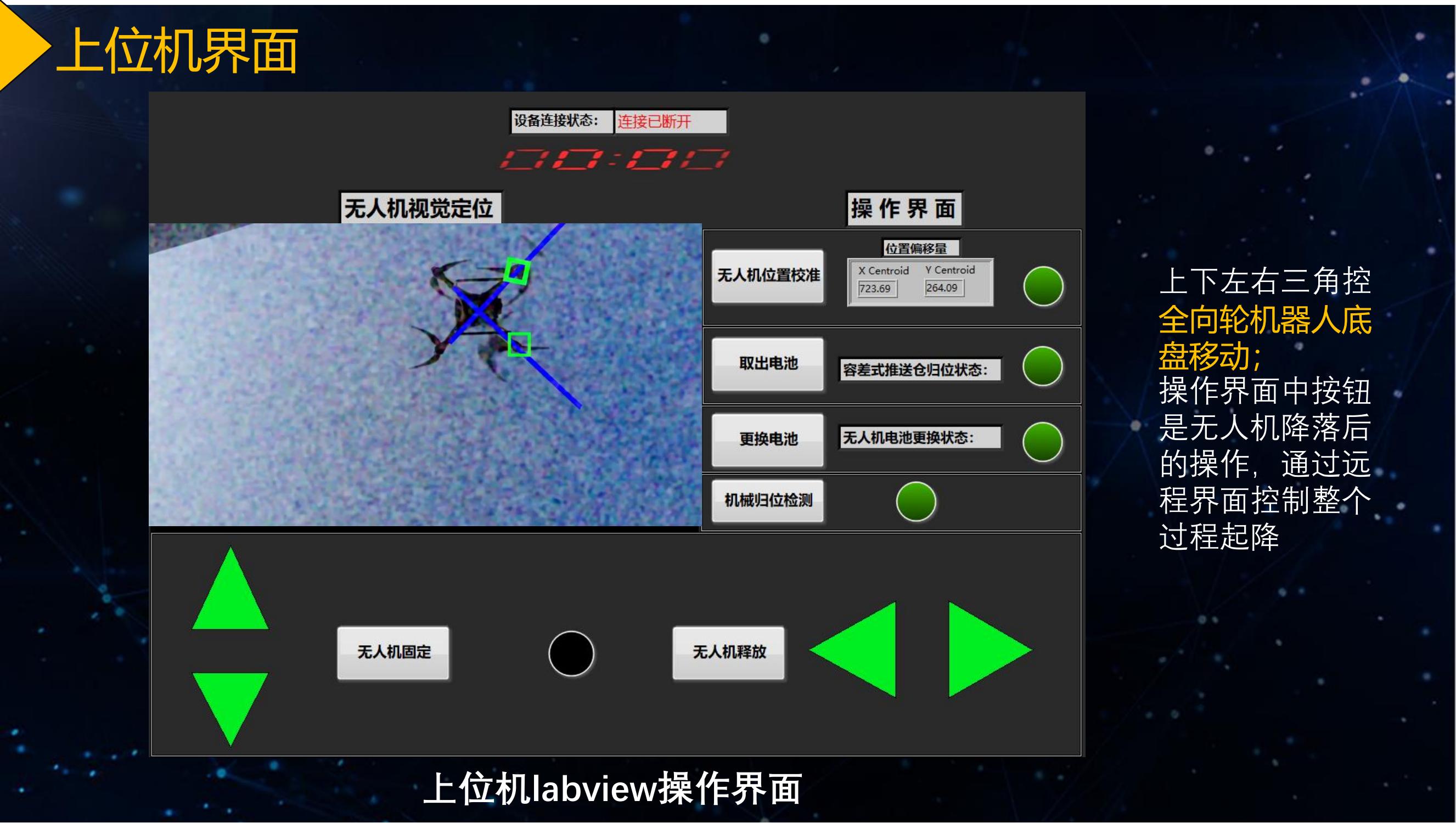
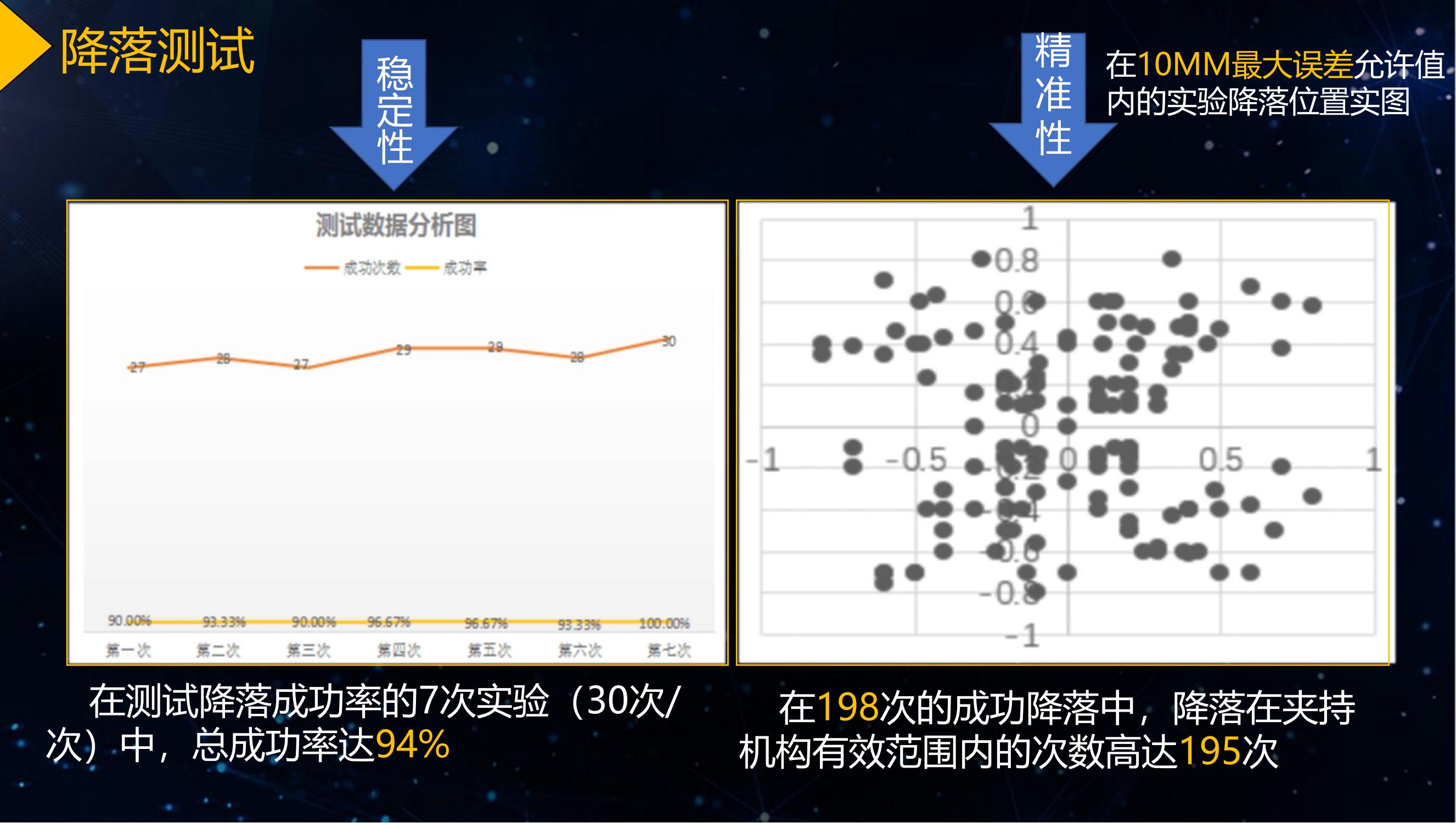
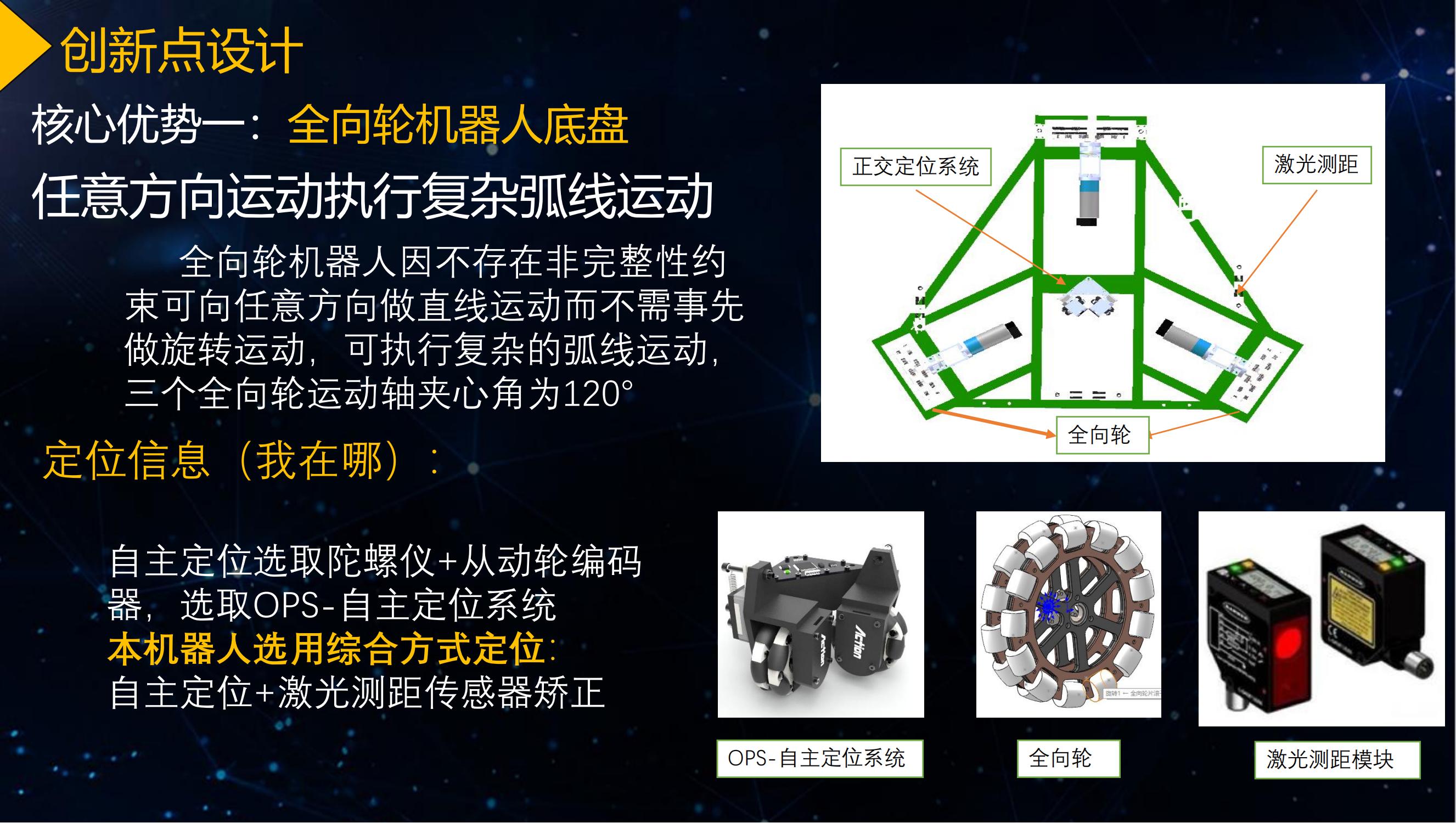
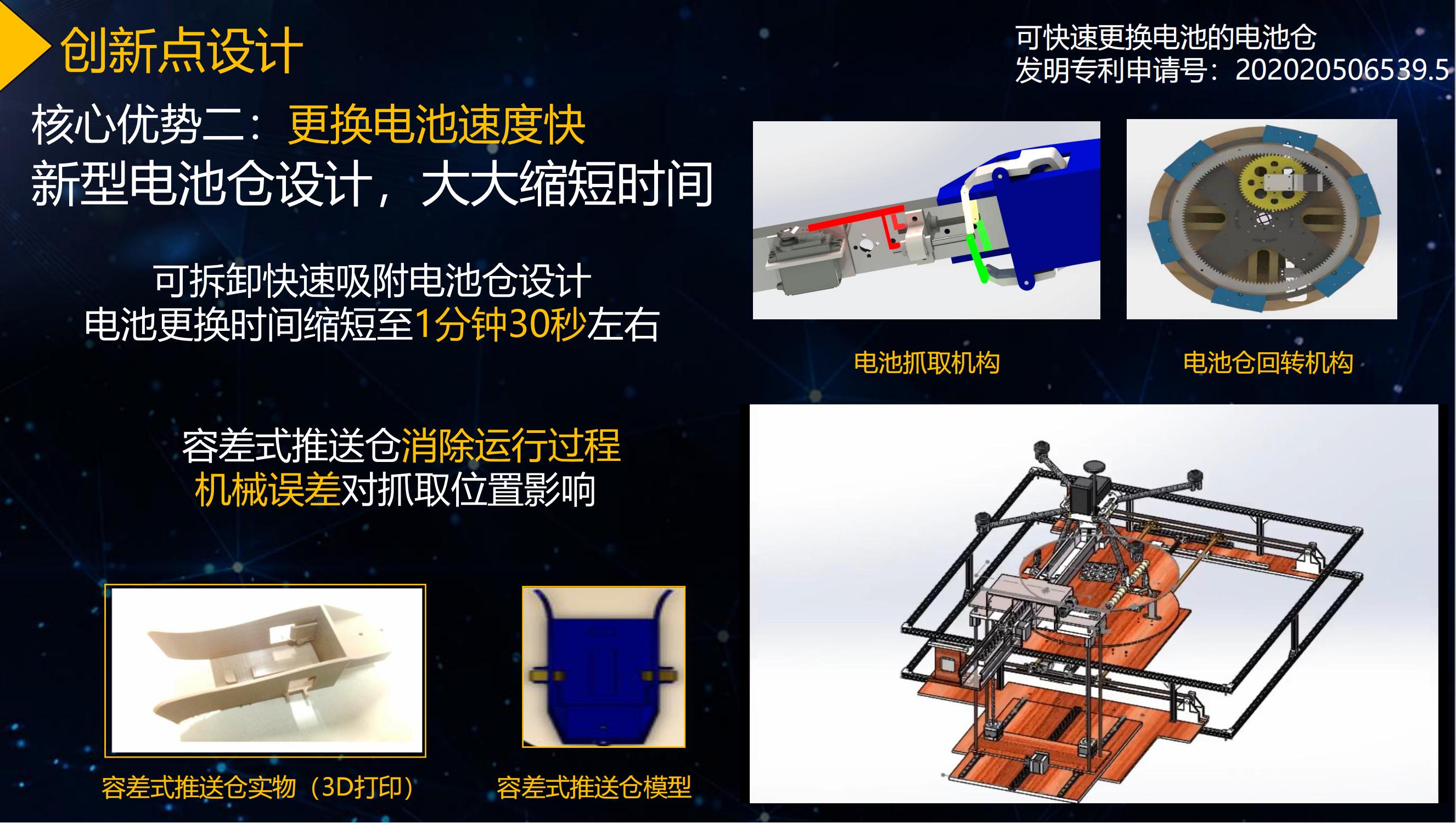
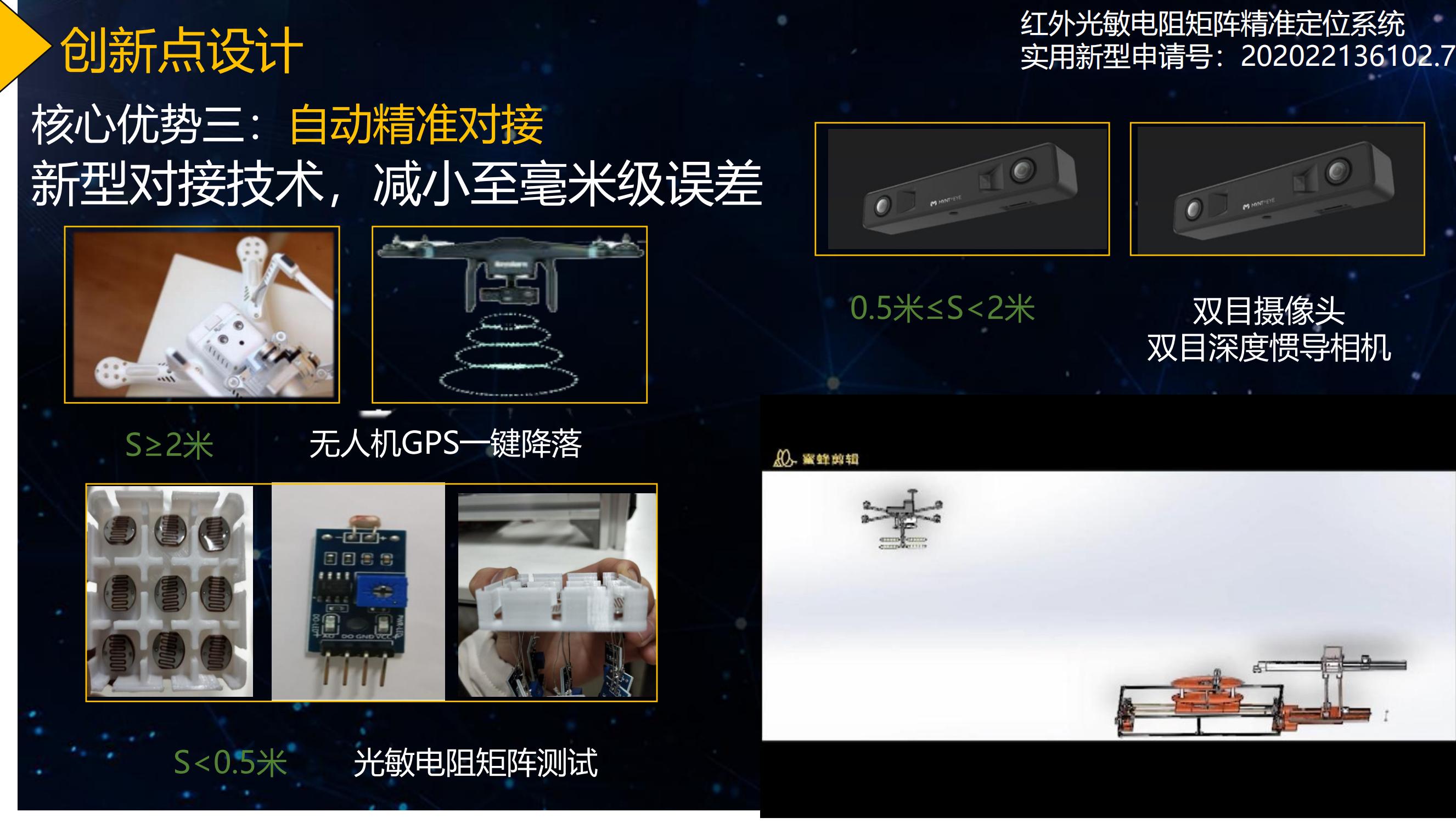
设计一款基于 OPS 平面定位系统的无人机毫米级快速更换电池起降平台,为实现更换电池的功能和操作可行性,需进行以下三个主要功能的研究与设计:1.无人机的精准降落 2.精准更换电池 3.远程控制系统。通过采用 Python语言编写,利用 Opencv、Tensorflow 等视觉处理,实现产品的智能性、可靠性。产品通过大型电池统一用电,尽可能减少对公共设施的占用。起降平台的工作流程依赖于四大系统:承接平台全方位移动系统、视觉定 位与微纠偏系统、电池更换系统、闭环控制系统。



