




作品名称陆空两栖全地形社区巡检机器人
参赛院校山东科技大学
指导老师任伟健、杨治宽
团队成员梁胜、王宗浩、丁晓煜、曲洋毅、杨茗介
奖项等级国赛二等奖
竞赛年份2023
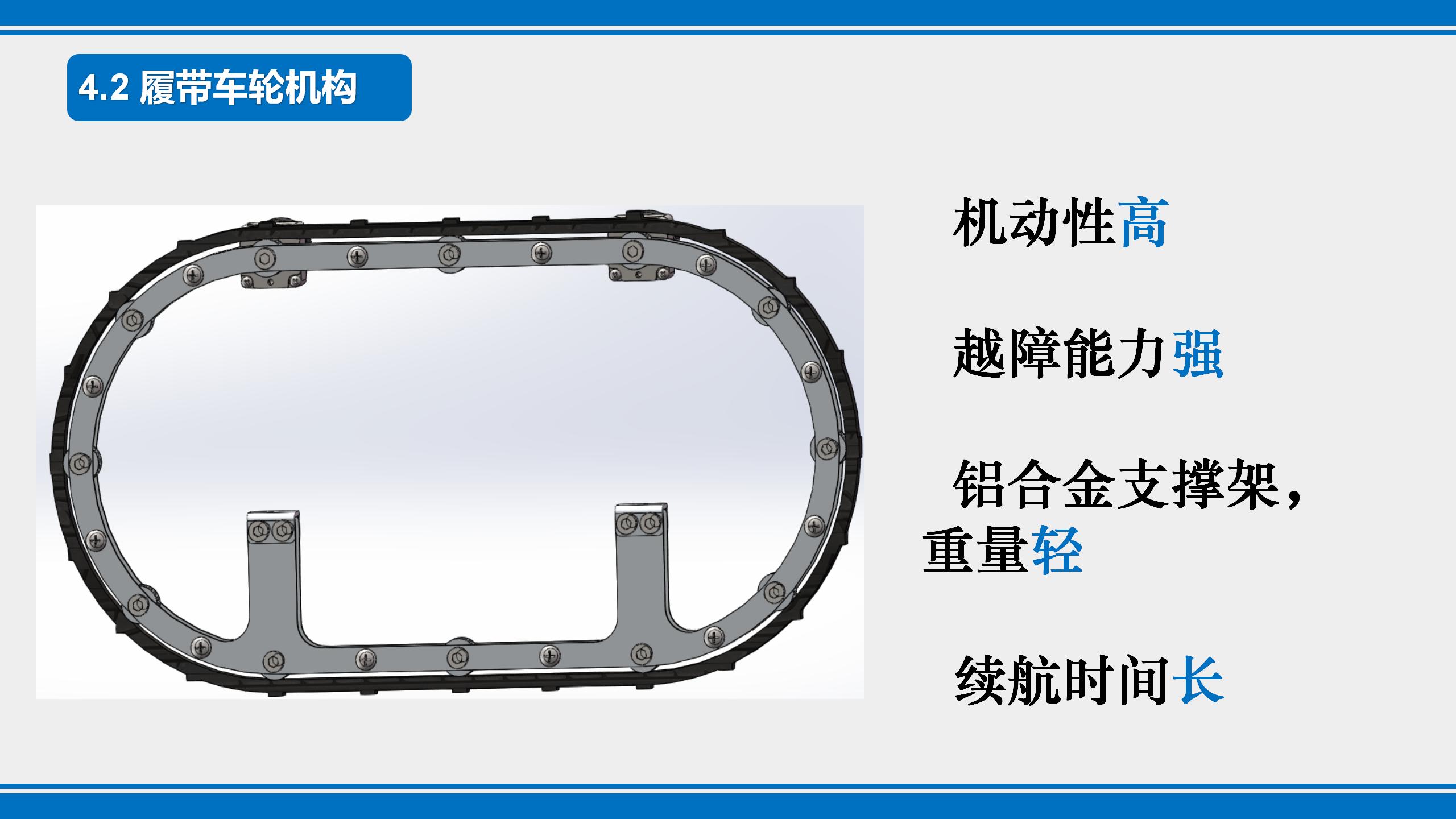
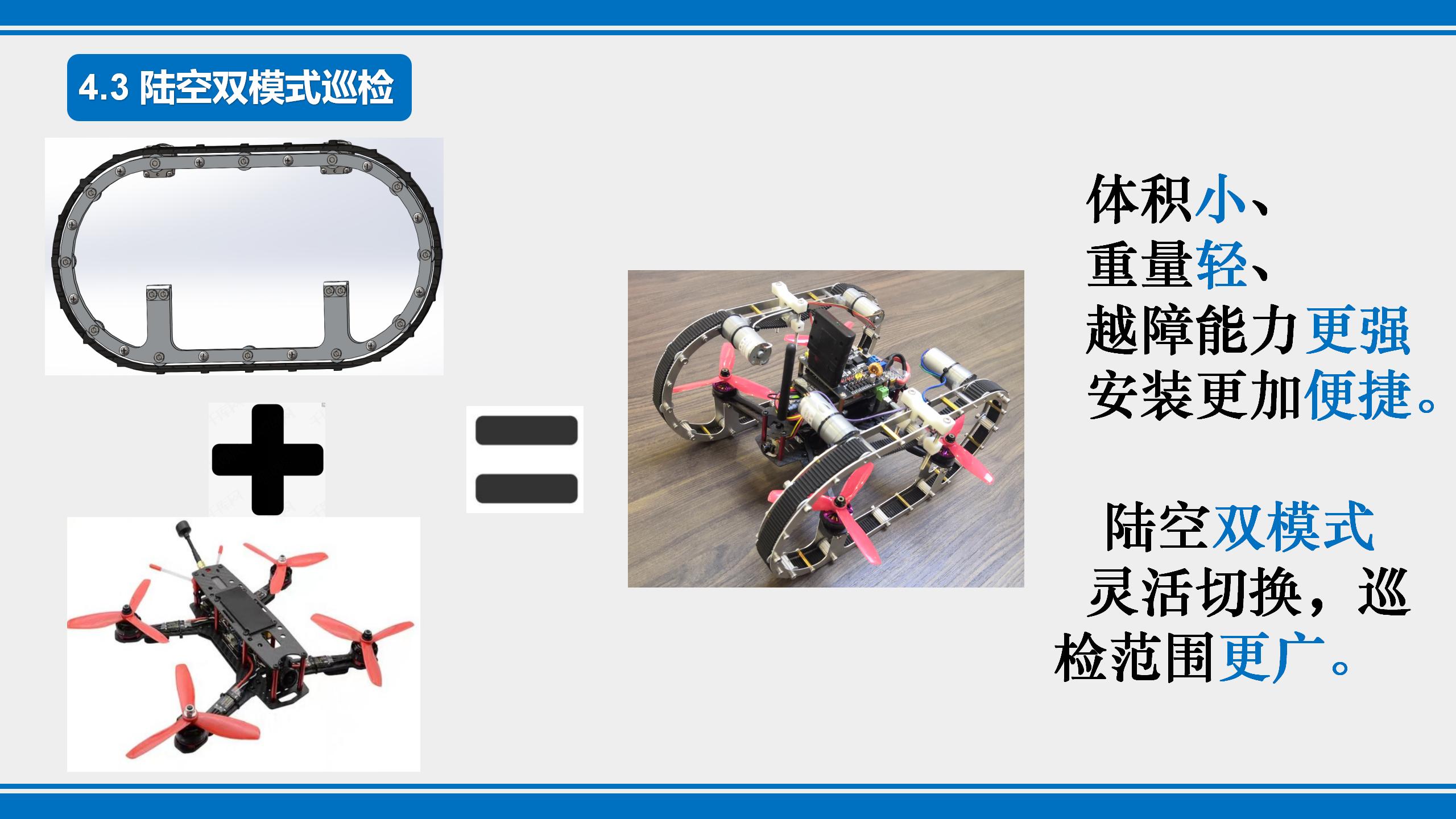
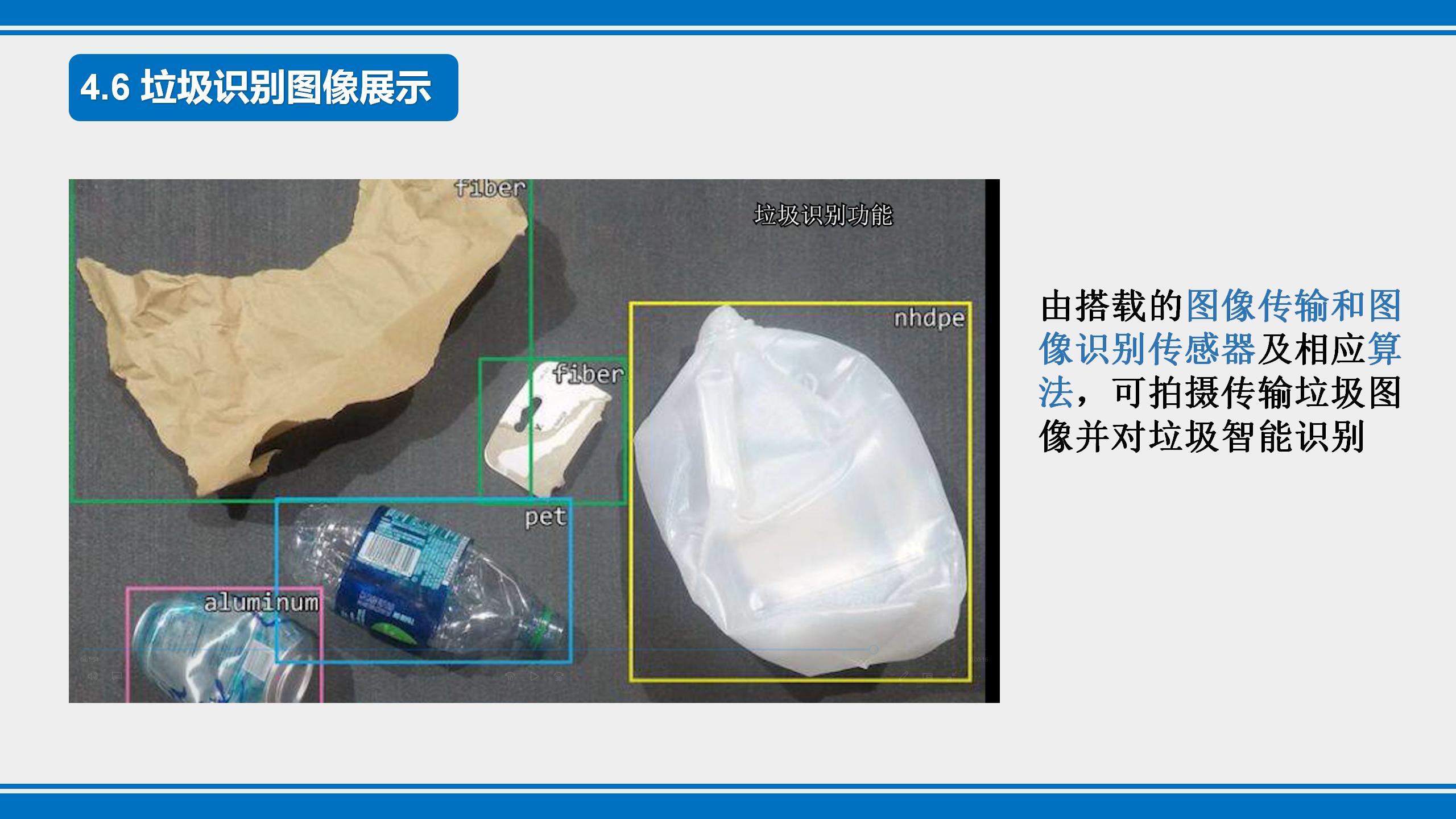
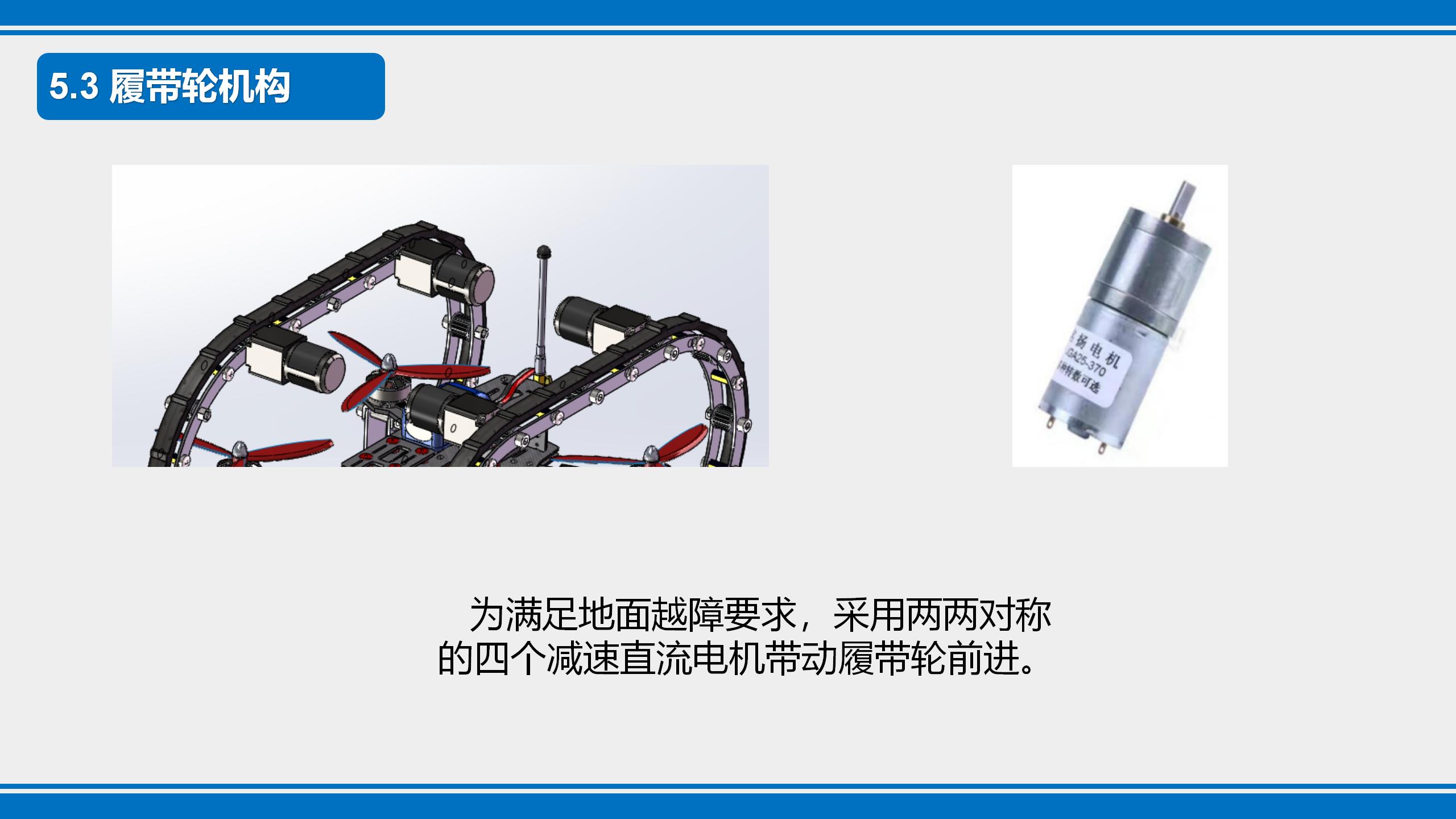
陆空两栖全地形社区巡检机器人主要由四旋翼飞行器部分、履带车轮部分和传感器部分构成,分别负责巡检机器人的空中飞行功能、陆地越障功能和社区安全巡检以及垃圾识别功能。 根据陆空两栖全地形社区巡检机器人的应用场景和功能需求,其飞行状态下需具备良好的稳定性和优良的飞行姿态。均衡考虑巡检机器人的稳定性能和可操纵性,本设计采用四旋翼飞行器作为空中飞行结构载体,在其飞行工作时,纵向和横向运动同时由四个电机完成,力矩大,可控裕度高。 根据陆空两栖巡检的功能要求,地面运动平台需具备较强的越障能力和长时间工作能力,此外,考虑到巡检时长的要求,该型机器人要求其体积较小,机身材料尽量选取轻质高强度材料,降低机身重量,增加续航时间。 综上考虑,本设计采用履带车轮作为地面运动平台,其两侧均由两个减速电机带动的主动轮和履带构成,四个电机两两呈对称分布。根据矿井巡检的功能要求,本设计搭载多种传感器,实时采集矿井现场的图像、声音、红外热像及温度数据、烟雾、多种气体浓度等参数,通过网络实时传输,实现替代巡检人工进行巡检。



