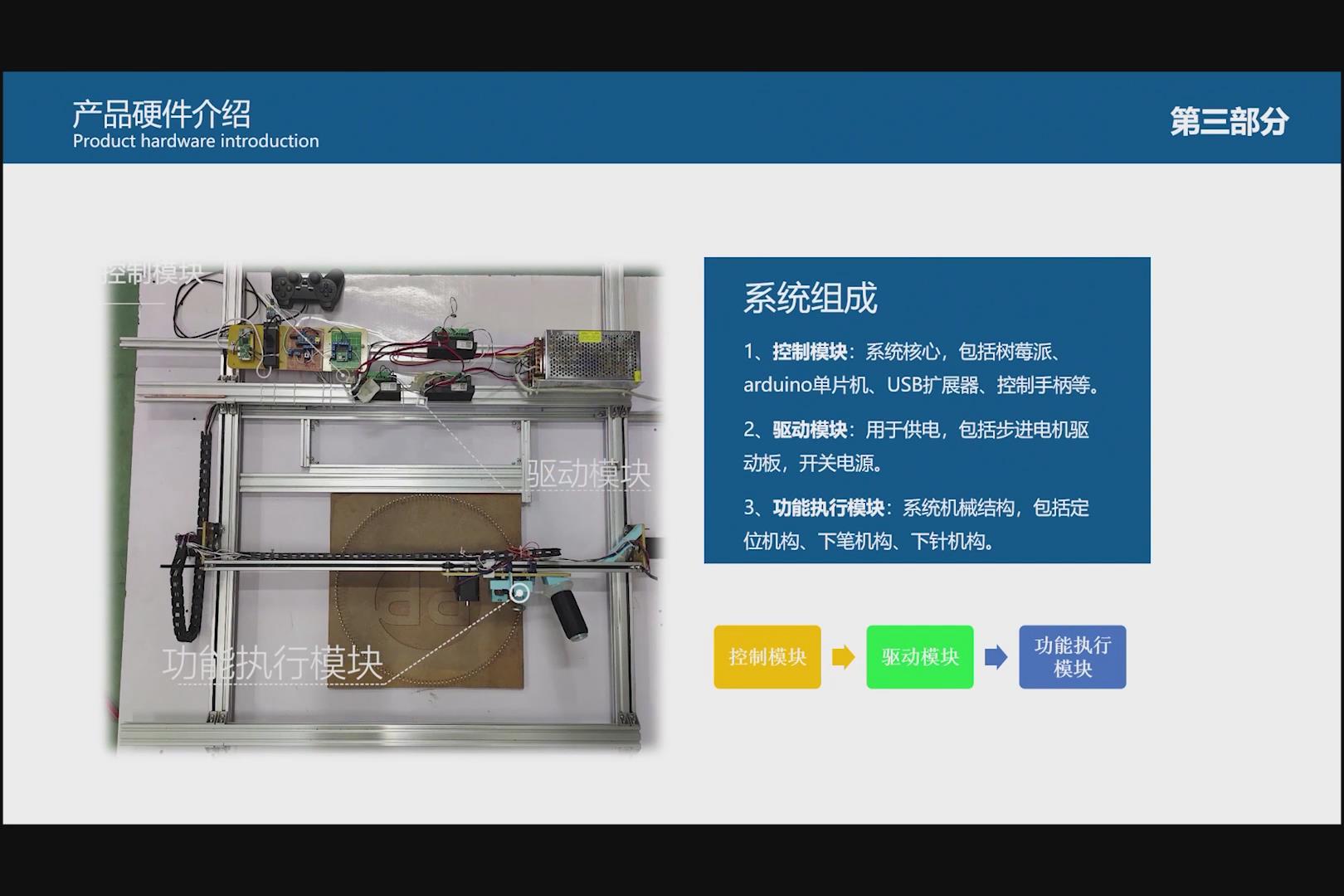
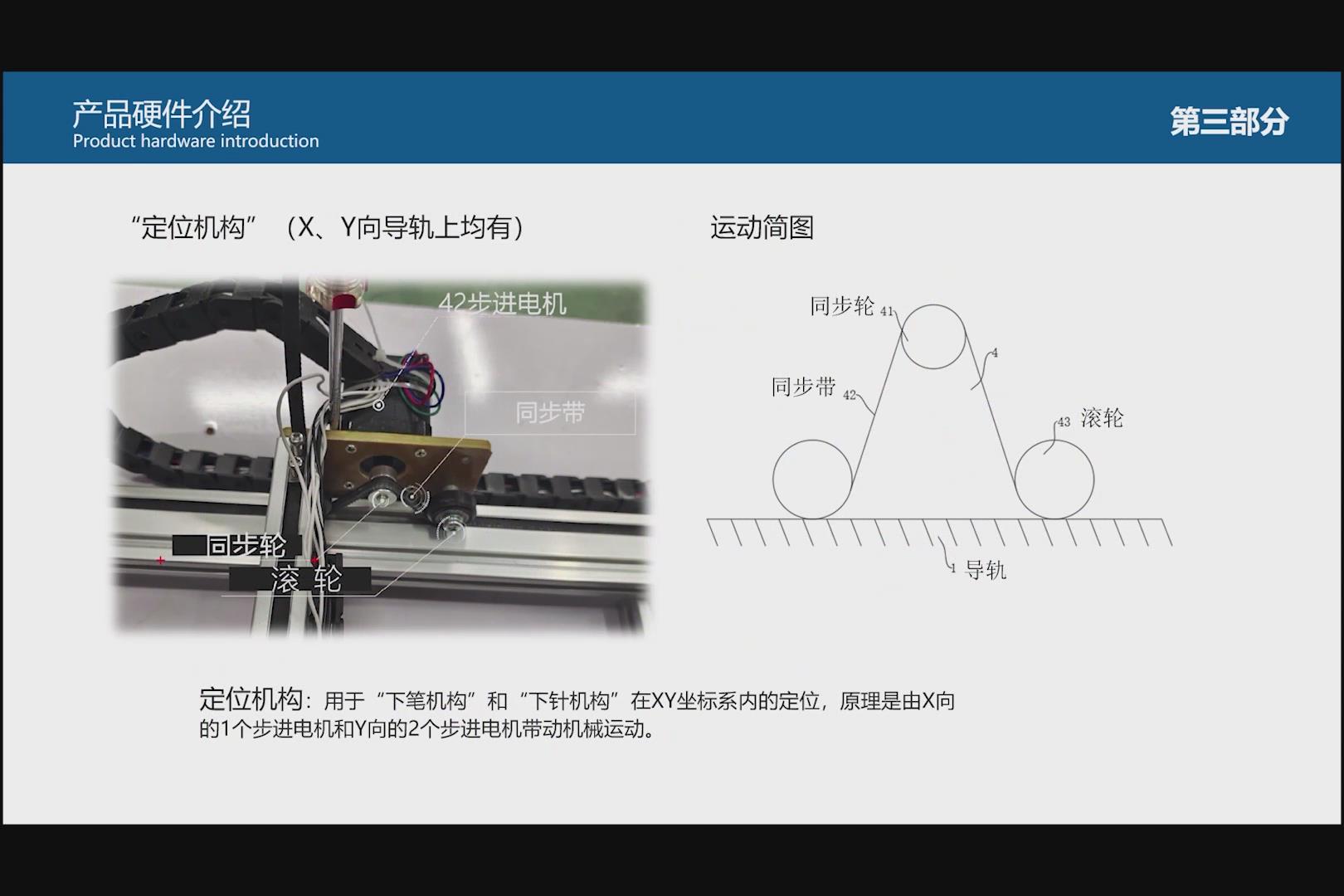
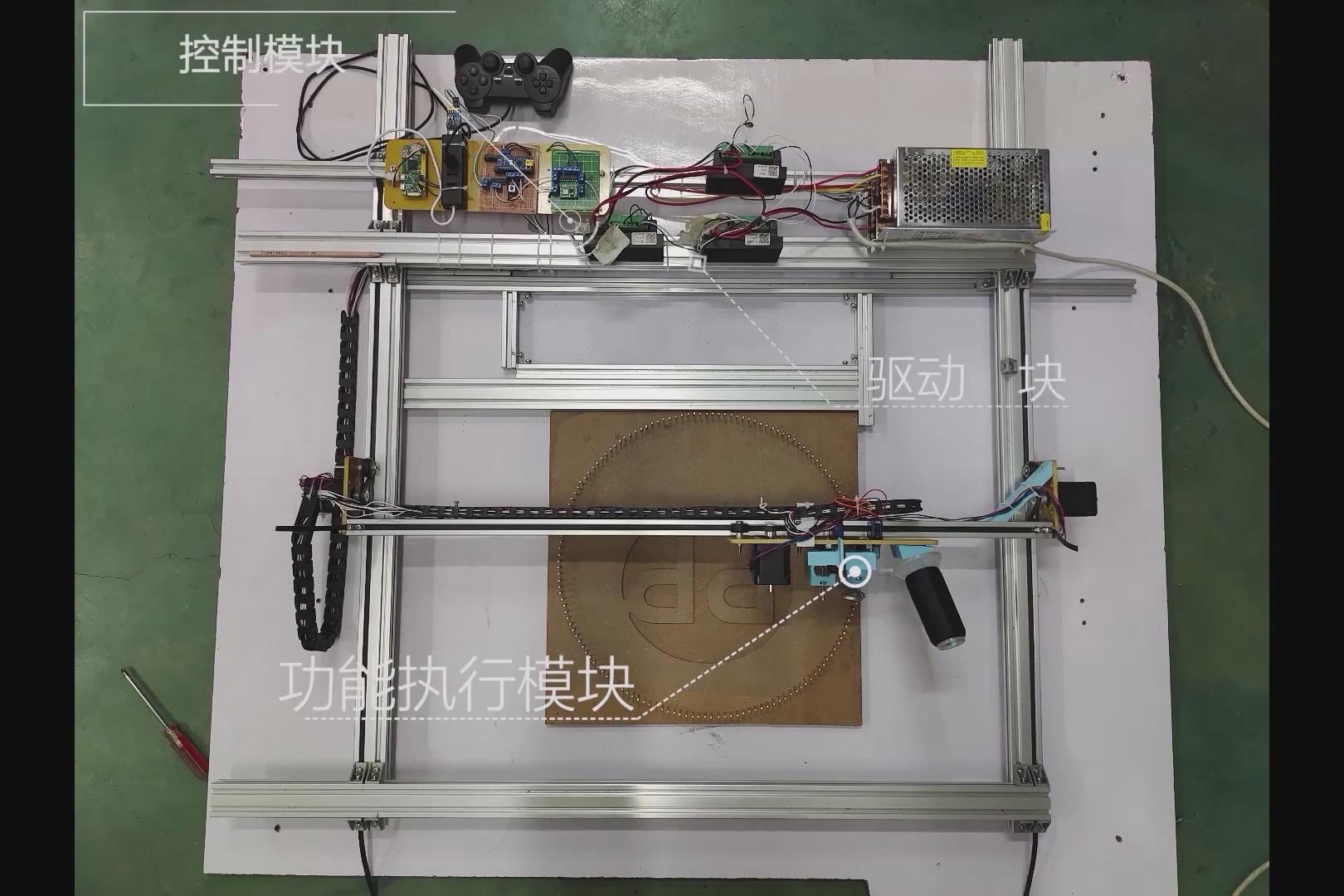
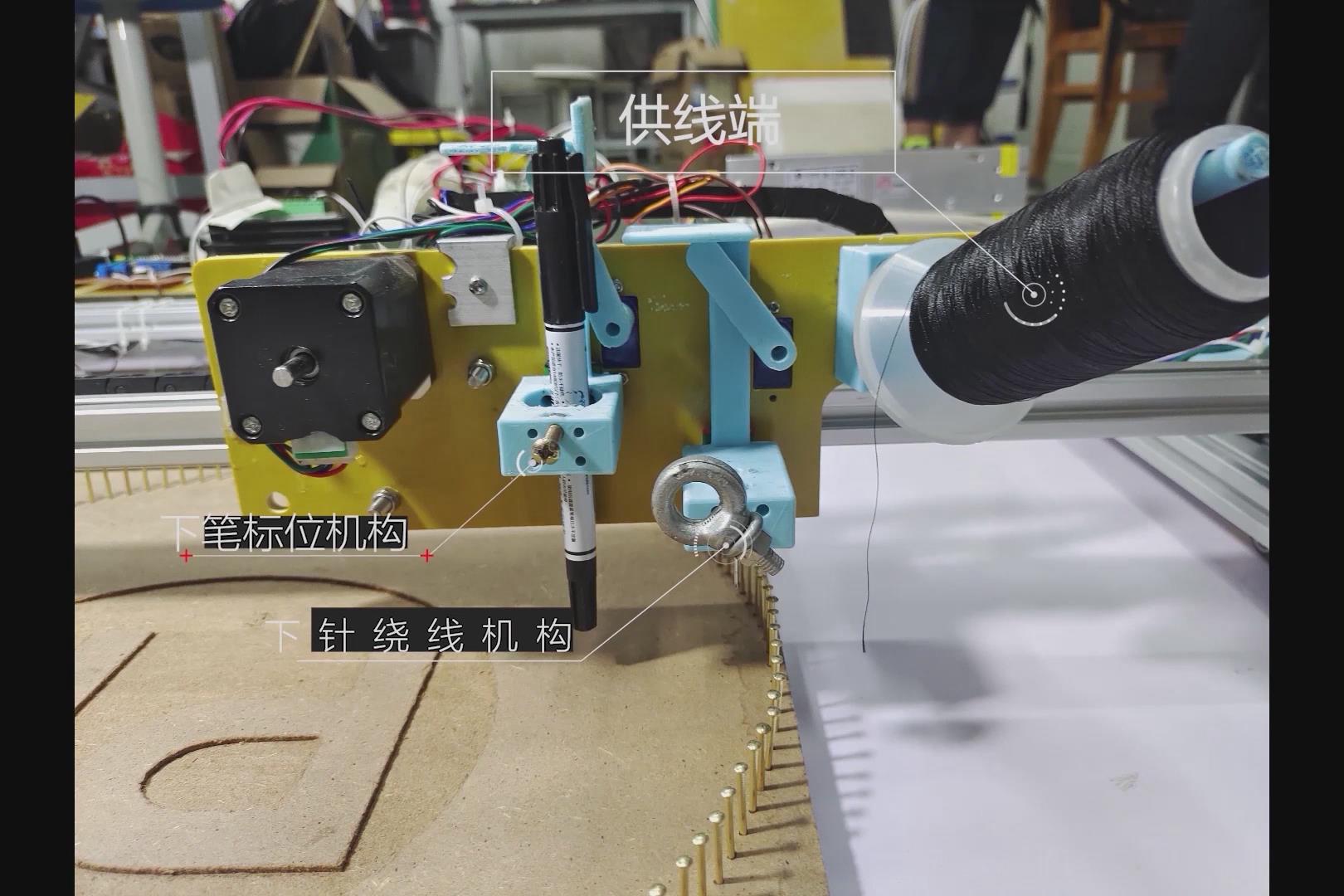
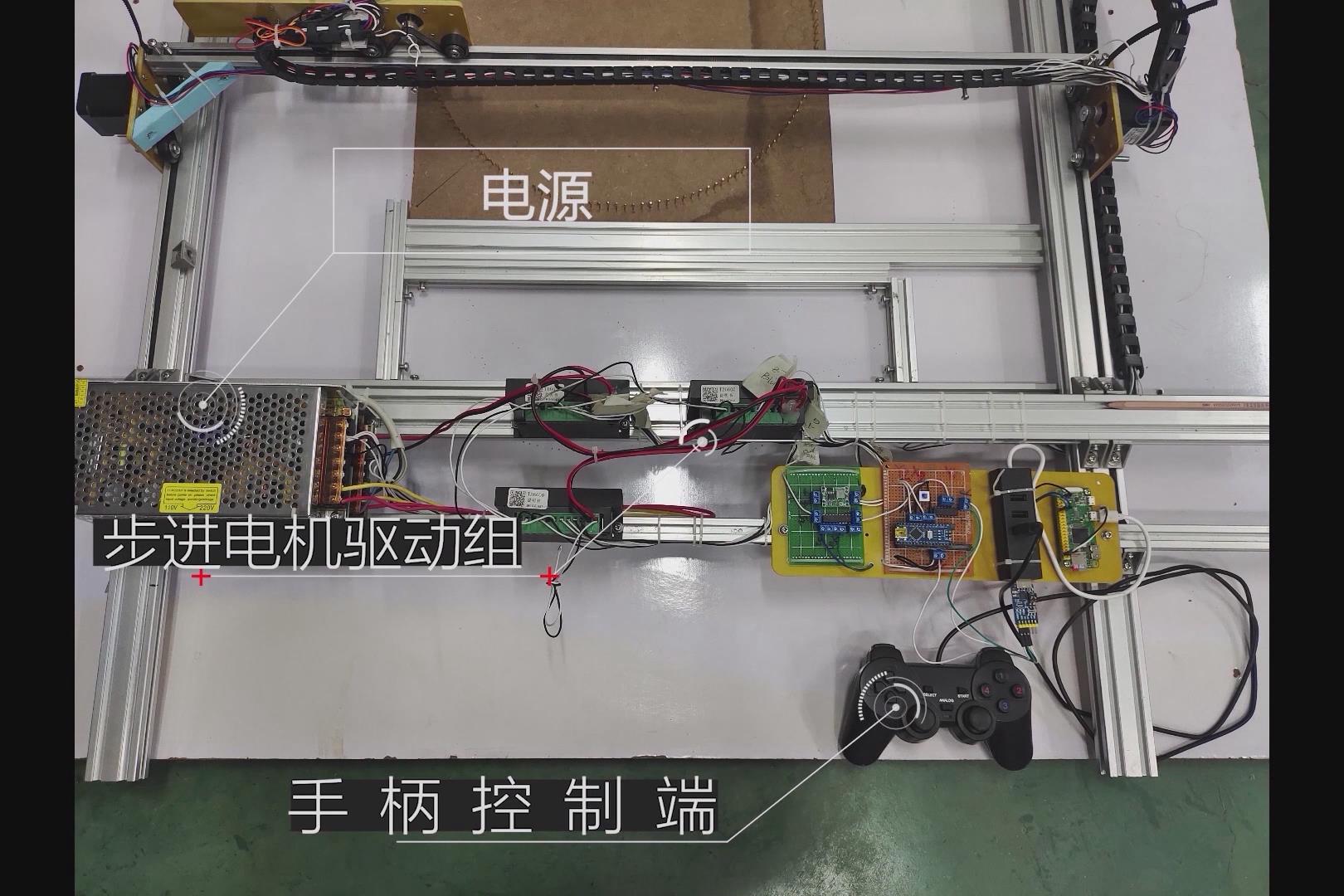
传统的“绕线画”通常是利用人工手动对钉子绕线,这种绕线方式往往既费时有费力。针对这个问题,我们研制出了基于树莓派的绕线绘画仪,在工作中完全利用机器对钉子绕线,无需人工操作,大幅度缩短了“绕线画”绘制时间,对于人工难以绘制的复杂图像,绕线绘画仪也可以轻松完成。本产品的核心部分是一套基于Python语言编写的软件智能系统,通过人工智能与深度学习软件自主设计艺术画作或者模仿古今中外书法绘画名家,由软件将图案或文字转化为控制命令(Gcode),与下位机(基于树莓派+Arduino单片机的控制系统)通信,将控制命令和下位机交互,控制机械运动,驱动机构以“钉子绕线画”的形式进行自动化创作。其工作原理是:首先由软件对“绕线画”图像进行灰度值转换,从而得到绕线画中各坐标点位的参数,将点位参数传输至树莓派中,通过其内部的算法执行运算,使其转换为G代码控制指令;再通过串口发送信号给单片机,由单片机控制电机驱动版,从而启动步进电机实现给定的功能,同时树莓派也要控制舵机实现下笔下针的功能,步进电机和舵机均通过相应传动装置来带动执行部件,最终完成绕线画的绘制。本产品的机械传动系统结构简单,安装维护方便,平均无故障工作时间(MTBF)高,可靠性强,能精确完成点位控制。机器框架较大,可控性优良,且框架刚性优秀,同时该机器可以通过简单的改装来满足不同的工作需求,使其工作的行程范围扩大。与市面上其他“钉子绕线画机器”相比,本产品最突出的特点是:该机器一改其他类型机器工作原理简单、工作能力单一、工业设计薄弱的缺点,创造性地使用工业级别的自动化零件,一方面可以极大地增加该机器的稳定性与寿命,另一方面也可使得该机器具有其他功能,实现集多种功能于一体。本产品还利用专业知识和实际需求自主设计出定位机构、下笔机构、下针机构,具体介绍如下:(1)定位机构:能够让下笔、下针机构实现精准定位,利用工业级铝型材设计出的定位机构的行程导轨,同时也起到机械稳固的作用。利用步进电机与同步轮、同步带、滚轮结合,实现机构在X、Y向导轨上的位置移动。(2)下笔机构:方便定位钉子点位的机构,根据强度要求,准确性要求设计的一款贴合于实际的3D打印件机构,同时还满足后期的偏置问题。(3)下针机构:孔径满足于针的大小,在偏置问题上贴合于下笔机构的一款3D打印件,它能够携带绕线针移动到指定的钉子位完成绕线。
基于树莓派的绕线绘画仪
作品名称基于树莓派的绕线绘画仪
作品分类智能产品
参赛院校西昌学院
指导老师李建雄、黎安庆
团队成员李松、蒋林均、李玖阳、滕妍妍、金诗哲
奖项等级三等奖
竞赛年份2022



