




作品名称阶梯环卫小助手
参赛院校兰州理工大学
指导老师谢小正
团队成员魏志旭、杨冉冉、张暖昕、喻戬、门思学
奖项等级一等奖
竞赛年份2022
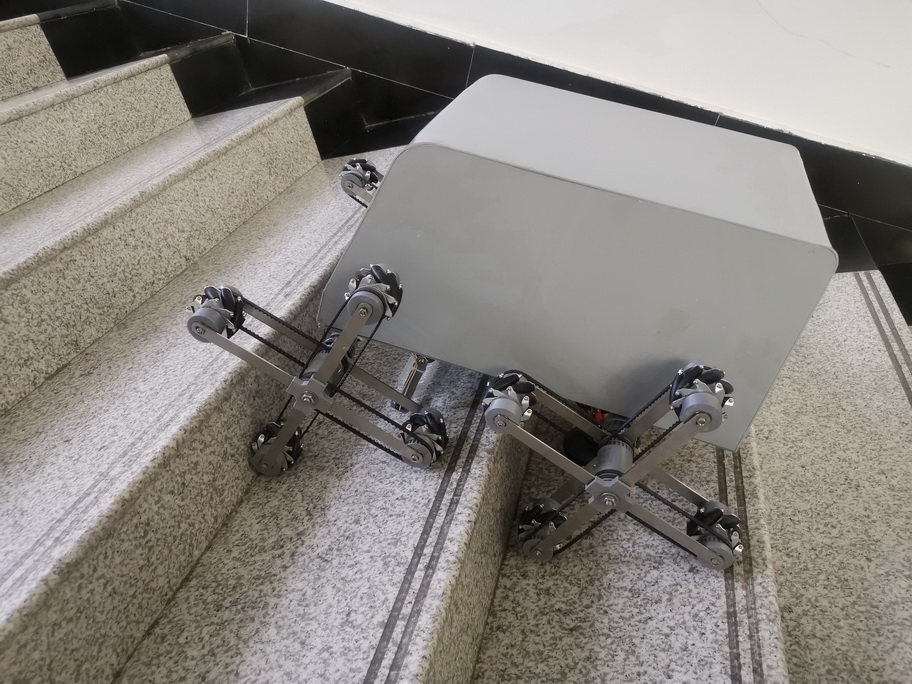
如今的城市高楼林立,包括在学校,景区等公共场所,都有大量的楼梯需要清洁人员去清扫。目前虽然扫地设备很多,但是在扫楼梯的设备处于空白状态,我们设计了一款楼梯清扫机器人,本产品主要由四大部分组成:基于STM32f103单片机的控制技术,由四组麦克纳姆轮组成的运动系统、清扫吸取系统、警报系统。 我们的设备,可以很好的解决楼梯的清洁问题,填补目前扫地机器人中楼梯清扫这一空白,并且减少了大量的人力物力使用,极大地提高清扫工作效率。主要原理为此机器人一次清扫两层台阶,其中运动机构,通过电磁离合器的通电吸附及断电断开来实现轮组的公转与自转的正常运转。上层台阶采用可移动的毛刷滚筒将垃圾扫至下层,下层采用两个圆盘刷,将垃圾聚集,然后从吸风口将灰尘与垃圾全部吸入垃圾储存囊中,达到清扫的目的,极大的提高清扫的工作效率。本作品的机械结构设计紧凑、运转效率高、耗能低、噪声小、适用性强、使用范围广、对环境影响小。 其创新点在于能够自主清扫楼梯,主要在于利用电磁离合器,来实现轮组的公转与自转分离,并通过带传动,带动麦克纳姆轮来在楼梯上实现平移。并且利用了STM32f103等先进控制模块,可以通过手机app来控制。本机器人将通过物联网与上层空台进行互动,在发生故障或出现突发状况时可以第一时间将情况反映给上层控台;采用手机app控制以及监测数据,当输入指令后,便自行工作,在工作时出现问题时,向手机控制端进行报警,安全高效



